
Introduction — a small morning, a big problem
I walk into the lab at 8:30. The bench is half set up, the animal ready, and I have a stack of protocols to run. The clock ticks. The task: place an electrode or injector with sub-millimeter precision. The automated stereotaxic Instrument is supposed to make that routine. Yet 35% of runs need repositioning (we track that). Why does a tool meant to save time often add steps instead? — c’est la vie, but I want better.
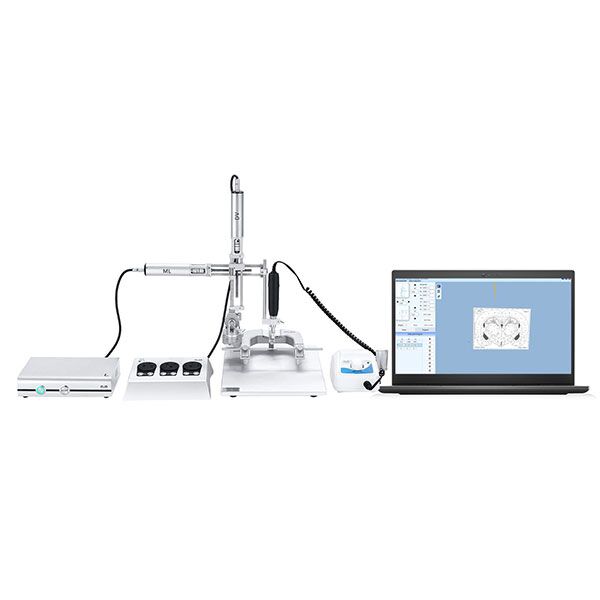
Think of one device that must match anatomy to plan. It must read coordinates, hold steady, and repeat. We count errors in microns. We measure cycle time in minutes. The data says delays cost money and morale. So I ask: how do we keep output high and waste low, in practice? (and yes, I mean real lab days, not ideal setups). Let’s move to the next layer and see what hides under the hood.
Hidden User Pain Points Beneath the Surface
I start with a technical frame: accuracy, repeatability, and user flow. When I say accuracy, I mean true position versus target. Repeatability is the device hitting the same spot time after time. Tools fail not because motors slip, but because the workflow is brittle. I see the same user pains again and again — long setup, awkward transfer of animals, and confusing software prompts. These annoyances add minutes. They add stress. They add error. I refer back to that morning scene; it’s the same story in other labs.
What breaks first?
Let me be blunt: the software, the jig, and the human-device handoff. For stereotaxic mice (stereotaxic mice), small delays ruin throughput. Positioning algorithms help, sure. But if the user interface demands ten clicks, people improvise. If the motion controllers or servo motors need manual tuning, techs lose time. Power converters and stepper drivers can be rock solid, but the real cost is cognitive load — the tiny frictions. Look, it’s simpler than you think: fix the handoff and you fix most waste. I’ve seen it. It’s frustrating; also fixable.
New Principles and Practical Steps Forward
Now I look ahead. New principles focus on making the system tolerant, fast, and kind to the user. For example, real-time feedback loops (positioning algorithms paired with motion controllers) reduce re-runs. Edge computing nodes can process imaging or coordinate data at the bench, cutting lag. For stereotaxic mice (stereotaxic mice), that means fewer reposition attempts and steadier sessions. I like systems that surface only the next step to the user. Short. Clear. No guesswork.
Real-world impact — what to expect
In trials I’ve watched, teams cut setup time by 20–40% when the system handled calibration and gave simple prompts. They also saw fewer misplacements. That translates to saved hours per week and better data quality. — funny how that works, right? Still, not every lab needs the same tweaks. Some need better hardware (servo motors, motion controllers). Others need smarter interfaces. We should compare needs to costs and act.
To help you evaluate, here are three metrics I use when choosing a solution: 1) True positional error under load (microns), 2) Median setup time per run (minutes), and 3) Recovery steps needed after a failed attempt (count). Use those. Test them. Measure improvements. We’ve done this in-house and I recommend it.
For tools and systems that actually reduce waste while keeping output, I look at vendors who solve the human-device handoff first. For my teams, that has made the biggest difference. For more, see BPLabLine.